

Cerca e trova immobili







Sviluppato un robot con le ali in grado di imitare i movimenti degli uccelli posandosi sui rami con la stessa agilità
L’atto di appollaiarsi comporta un equilibrio molto delicato di tempismo, forze ad alto impatto, velocità e precisione. Si tratta di un gesto così complesso che nessun robot ornitottero (aeromobile a superficie alare battente) è stato finora in grado di padroneggiarlo.
Di recente, Raphael Zufferey, ricercatore del Departamento de Ingeniería de Sistemas y Automática presso la Escuela Técnica Superior de Ingeniería dell’Università di Siviglia, in Spagna, e dell’Ecole Polytechnique Fédérale de Lausanne (EPFL), ha pubblicato un articolo su Nature Communications in cui descrive un metodo di appollaiamento autonomo capace di fare atterrare e di mantenere in equilibrio su un ramo grandi robot ad ala battente.
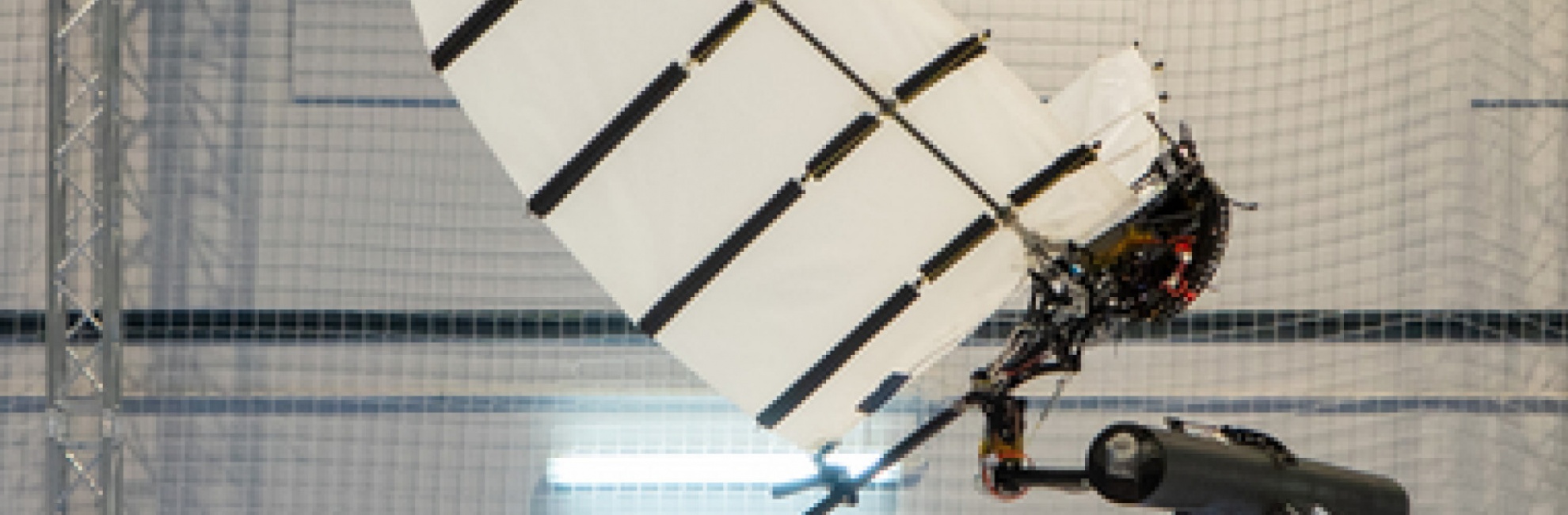
Il lavoro dell’Università di Siviglia e dell’EPFL, nello specifico, propone una tecnica di appollaiamento autonomo per grandi robot ad ali mobili attraverso un meccanismo simile a un artiglio. La macchina per mezzo della quale tale metodologia è stata testata è un robot aereo dall’apertura alare mobile di 150 centimetri e del peso di 700 grammi costruito in collaborazione con i colleghi dell’Università di Siviglia. Alla prima dimostrazione pratica, l’ornitottero è stato in grado di appollaiarsi autonomamente su un ramo all’interno di uno spazio coperto.
I problemi ingegneristici legati all’atterraggio di un ornitottero su un trespolo hanno richiesto la gestione di molti fattori. L’ornitottero doveva essere in grado di rallentare significativamente mentre si apprestava all’atterraggio, pur mantenendo il volo. L’artiglio, quindi, doveva essere realizzato abbastanza robusto da poter afferrare il trespolo e sostenere il peso del robot, senza però essere troppo pesante. «È questo uno dei motivi per cui abbiamo scelto un singolo artiglio piuttosto che due», ha affermato Zufferey. Inoltre, il robot doveva essere capace di percepire l’ambiente e il ramo di fronte a lui in relazione alla propria posizione, velocità e traiettoria per completare l’atterraggio con successo.
I ricercatori hanno superato tali ostacoli dotando l’ornitottero di un computer di bordo e di un sistema di navigazione, integrati da un sistema esterno di cattura del movimento. L’appendice dell’artiglio è stata finemente calibrata per compensare le oscillazioni di volo verso l’alto e verso il basso, nel tentativo di individuare e afferrare il posatoio. L’artiglio stesso è stato poi progettato per assorbire lo slancio in avanti del robot al momento dell’impatto e per chiudersi rapidamente e saldamente per sostenere il suo peso, consentendo così al robot, una volta appollaiato, di rimanere sul trespolo senza dispendio di energia.
In prospettiva, i ricercatori vorrebbero ampliare e migliorare il robot, soprattutto in un ambiente esterno. «Al momento, gli esperimenti di volo sono condotti al chiuso, perché c’è bisogno di una zona di volo controllata con una localizzazione precisa da parte del sistema di cattura del movimento. In futuro, vorremmo aumentare l’autonomia del robot per eseguire compiti di atterraggio e manipolazione all’aperto, in un ambiente più imprevedibile», ha commentato Zufferey.